引言加州大学伯克利分校的研究人员开发了一种可重复、低成本和紧凑型的基准平台,用于评估机器人学习方法,他们称之为REPLAB。他们最近的研究发表了加州大学伯克利分校的研究人员开发了一种可重复、低成本和紧凑的基准平台,用于评估机器人学习方法,他们称之为REPLAB。他们最近的研究发表在arXiv的一篇论文上,得到了Berkeley DeepDrive、海军研究办公室(ONR)、谷歌、英伟达和亚马逊的支持。
“基于机器学习的方法最近在机器人领域越来越流行,但由于不同实验室使用的硬件设置存在显著差异,目前没有简单的方法进行比较。”研究,告诉TechXplore。“例如,在抓取研究中,从手臂或手爪的类型到手爪的材料,一切都会影响抓取性能。所以,即使你获得的抓取精度比去年的方法好,也不清楚是因为控制更好还是硬件更好。”
近年来,对机器学习方法的标准化措施和基准平台的需求日益增长,以评估机器人技术。建立有效的基准有时可能具有挑战性,特别是对于机器人技术学习来说,因为机器人应该将学习到的模型扩展到新的对象和情况。加州大学伯克利分校开发的新基准平台为测试机器人物体操纵方法提供了一种低成本、易于复制的解决方案。
“机器学习的其他应用,如机器学习和自然语言处理,从数据集和基准中受益匪浅,因为它们促进了对重要问题的研究关注,提供了绘制研究小组进展的方法,并有助于快速识别,传播和改进有效的想法,”参与这项研究的另一名研究人员Dinesh Jayaraman告诉TechXplore。“我们设计REPLAB是为了给机器人学习研究社区提供这个功能。”
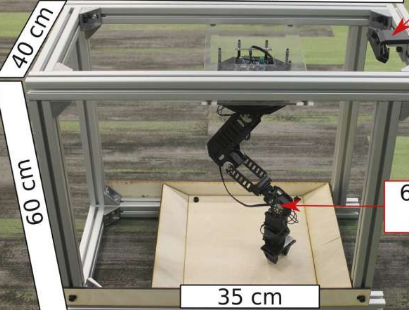
REPLAB B有多个组件,包括机械臂、相机和工作空间,放置在一个70 x 40 x 60cm的长方体空间内。该平台的建造成本约为2000美元,可以在几个小时内组装完成。其紧凑和低成本的设计使更多的研究人员,甚至是那些预算有限的研究人员,能够评估其框架和方法。
标签:
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!