导游。跳。游泳。大自然可以用同样的身体部位做各种事情,比如走路、跳跃和游泳。机器人?想想吧。你通常会看到他们走过他们的机械设计和刚性。跳。游泳。大自然可以用同样的身体部位做各种事情,比如走路、跳跃和游泳。机器人?想想吧。你通常会看到它们通过机械设计和刚性连接来完成有限的任务。由于机器人技术领域正在使用软机器人和适应性机器人,这种差异正在缩小。如果机械手是可重构的,它可以使用相同的硬件来实现不同的功能。
在科罗拉多州立大学,他们正在引进一种新型的小型可重构机器人,这种机器人可以变形。它的塑料结构可以软化,然后再次硬化,从而改变关节的形状和运动。
研究人员选择在自适应机器人实验室解除运动限制。该实验室专注于建造小型自适应机器人,这些机器人可以重新配置其形状、结构或功能,以完成各种任务。机器人可以在从陆地、空中到水下的环境中运行。机器人可以切换不同的腿部位置,从而可以跨越障碍物或在障碍物下降低位置。
“具有使用变形关节的可重构机构的自适应步行机器人”描述了他们的工作。作者是孙洁峰和赵建国。两人都来自科罗拉多州立大学机械工程系。他们的论文发表在IEEE机器人和自动化快报上。
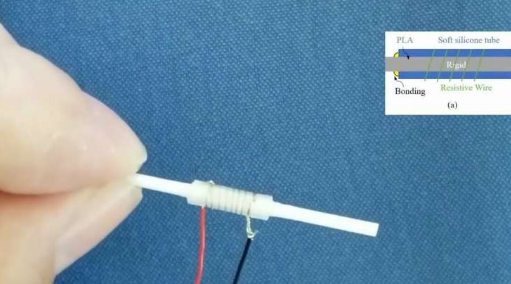
他们使用不同的材料来制作变形的关节。该结构由塑料制成,IEEE Spectrum的Evan Ackerman表示,大多数连接器都是3D打印的。
关节变形是一个奇怪的概念。顾名思义,对于柔顺关节,关节可以是柔性的,而对于结构,关节可以是刚性的。
此外,这很有趣:“如果一个机械装置有多个SMJ,我们可以通过战略性地软化和固化适当的SMJ来改变它的功能,而无需在制造后改变基本的机械设计,”两人在视频笔记中写道。
他们展示了他们的概念是如何以能够产生不同足部轨迹的腿部机构的形式出现的。您可以通过选择SMJ的位置并变形其链接的形状来做到这一点。
他们说,“制造的机制显示了三个示例轨迹之间的平滑过渡。”"通过这些轨迹,我们在步行机器人中实现了该机制,以展示不同的功能."
标签:
免责声明:本文由用户上传,如有侵权请联系删除!