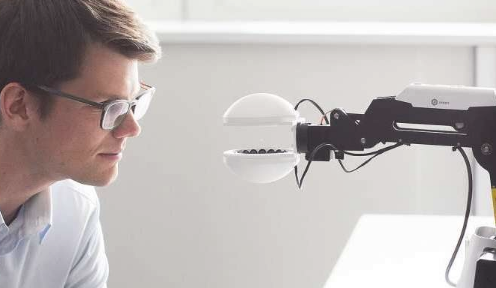
ETH的先驱研究员Marcel Schuck正在开发一种机器人手爪,可以在不接触的情况下操纵小而易碎的物体。这项技术基于声波。Marcel Schucketh的先驱研究员Marcel Schuck ETH正在开发一种机器人手爪,可以在不接触的情况下操纵小而易碎的物体。这项技术基于声波。马塞尔舒克(Marcel Schuck)在他的工作台上组装了这个小设备,这让人想起了在学校的物理课:将包含两个半球、像一副耳机一样的设备连接到载有微芯片的电路板上。他正在用一个组件来演示物理效应。一个小球在两个半球之间盘旋,被超声波阻挡。科学家解释说,“这种现象叫做声悬浮。”
作为他的ETH先锋奖学金的一部分,这位前ETH博士生目前正在开发一种方法,可以在不接触小物体的情况下完全提起和操纵它们。在制表业或半导体行业损坏小零件需要花钱的时候,这一点尤其重要。
常规机械手容易损坏易碎物品。为了解决这个问题,可以使用一个柔软的类似橡胶的夹子。这些虽然不会造成伤害,但是很容易被污染,就像用好的橡皮擦一样。此外,这些软操纵器仅提供有限的定位精度。
简单:这是舒克的项目“无接触机器人”的原理。这项技术基于一种效应,已经发展了80多年,首次用于太空探索。超声波会产生一种人类看不见也听不见的压力场。当声波相互重叠时,就会产生压力点,小物体就会被困在这些点上。因此,它们似乎在声学陷阱中自由漂浮在空中。
他实验室里的设备就是舒克想要开发的产品原型:使用超声波的电控机器人夹钳。这位31岁的科学家将两个用3d打印机制作的半球形扬声器安装到许多小扬声器中。相关软件允许Schuck控制扬声器,以便可以移动压力点。目的是实时改变自己的位置,让悬浮物不会掉到地上。博士研究生ETH MarcR thlisberger正在研究这方面的内容。他与舒克和硕士生克里斯蒂安伯卡德在苏黎世科技园共用一个实验室。
标签:
免责声明:本文由用户上传,如有侵权请联系删除!