北京理工大学科学家的一篇研究论文提出了一种自动操作方法,用于传输由光电镊子 (OETS) 驱动的微粒。
这篇发表在Cyborg and Bionic Systems杂志上的新研究论文开发了一个动态控制框架,用于同步离散化操纵多个微粒。实时根据相应的状态和环境信息为每个微目标制定差异化的运动决策,使所有被控目标都能安全、准确地到达目标位置。微粒的运动通过 OET 操纵系统中虚拟电极的动态调制来控制,以遵循基于路径规划器的动态决策的期望轨迹。
“在各种机器人微操作技术中,OETs因其在大规模并行操作方面的优势而受到广泛关注。” 研究作者王华平说,他是北京理工大学教授。在光电镊子系统中,可编程虚拟电极(特别是在局部非均匀电场中)是通过将光图案照射在光电导层上而产生的,在光电导层上,微型物体被介电泳力驱动。可以动态调制虚拟电极的形状、大小、数量和位置,从而控制微目标的位置、速度和方向。具有并联驱动和独立控制的原生特性,ODEP 机制是许多具有高灵活性和高效率要求的生物显微操作任务(例如细胞捕获、筛选和分析)的重要工具。然而,大多数OET控制系统对虚拟电极的运动轨迹进行了预先规划甚至手动控制,不足以保证在存在潜在碰撞风险的环境中的稳定性和效率。“在易碰撞的液体环境中同时传输不同类型(包括细胞)的微粒是我们的主要关注点,”Wang 说。这不足以确保在具有潜在碰撞风险的环境中的稳定性和效率。“在易碰撞的液体环境中同时传输不同类型(包括细胞)的微粒是我们的主要关注点,”Wang 说。这不足以确保在具有潜在碰撞风险的环境中的稳定性和效率。“在易碰撞的液体环境中同时传输不同类型(包括细胞)的微粒是我们的主要关注点,”Wang 说。
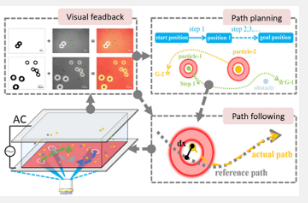
上述基于光电镊子系统的控制框架由三个主要部分组成:视觉反馈模块、路径规划器和运动控制器。其中,视觉识别算法为后两个模块提供环境信息和目标状态;路径规划器根据全局优化模型,根据实时信息逐步制定局部最优路径;路径跟随误差由运动控制器动态限制。“路径规划器的性能是成功实现同步离散化操作的关键。”Wang 强调说。
为了尽可能提高多粒子输运的效率,研究人员提出了一种基于匈牙利法的改进目标分配方法。除了欧几里得距离外,成本函数还包括额外的绕行距离和目标逃脱后重新捕获的潜在损失。为了避免碰撞,设计了一种基于 POMDP 算法的动态路径规划器,以确定每个控制周期内所有粒子的最优运动策略。由于布朗运动、流体扰动等环境干扰,决策期开始时获得的观测信息存在误差。因此,研究团队以概率分布的形式对这种不确定性进行建模。此外,
在路径跟踪方面,研究人员建立并分析了由光电镊子驱动的微粒的运动学和动力学模型。然后设计并优化了基于代理滑模控制方法的控制器,以抵抗干扰干扰,减少跟踪误差,最终实现路径跟踪。
为了验证所提出的控制框架的有效性,研究人员使用聚苯乙烯 (PS) 微球和 3T3 细胞进行了传输实验。设计了两组粒子相互靠近的极端实验来测试算法的稳健性。粒子的交会和分离是通过交错前进以较小的规避成本完成的,并在目标位置以三角形和梯形分布模式排列。此外,将细胞以特定模式运送到指定位置的实验作为细胞模式化的初步尝试,表明将上述方法应用于生物医学研究的可行性和潜力。
作为一种具有独立控制的并行操作的新方案,基于光电镊子的同步离散化操作方法有望提高多项生物医学任务的效率和灵活性。“除了细胞模式化任务,我们将在未来的工作中将这种操作方法应用于更多生物医学研究场景,例如细胞与细胞相互作用的研究、细胞培养条件的分析、用于重建人工问题的细胞组装等。” ,王说。
标签:
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!